一、项目背景
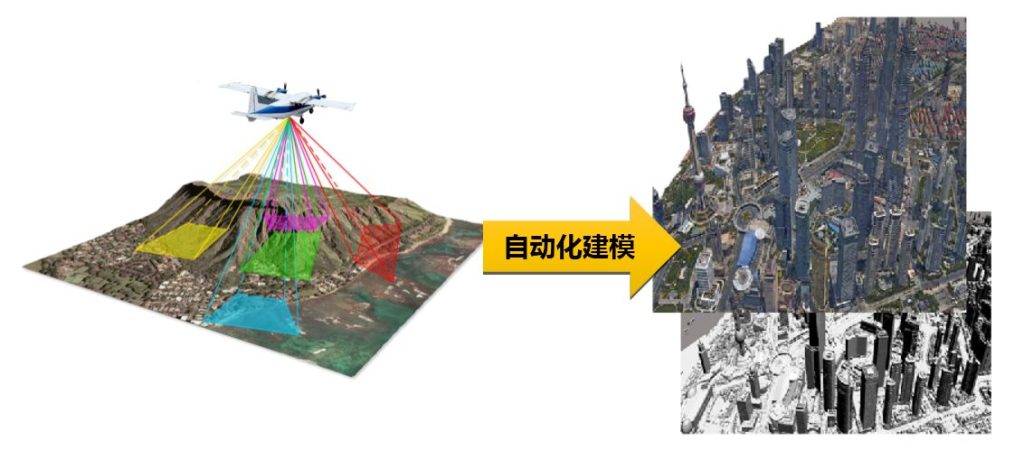
基于倾斜摄影的实景三维建模在城市建设与管理等方面有着广泛的应用,本次项目依托仙桃市老旧小区片区化改造需求,开展基于倾斜摄影测量技术的实景三维建模,高分辨率的实景三维模型不仅能为老旧小区改造规划方案提供现实依据、为老旧小区片区化改造决策提供详细准确的资料,同时可作为城市1:500地形图更新的底图。
二、单位介绍
仙桃市勘测设计院始建于1988年,隶属于仙桃市城市建设投资开发公司,拥有甲级测绘资质、甲级工程勘察资质、乙级城乡规划编制资质、丙级工程设计建筑(建筑工程)、丙级道路工程、给水工程、排水工程(市政行业)资质,取得了《计量认证资质证书》,并通过质量、环境、职业健康安全管理体系“三位一体”认证。
业务范围包括工程勘察(工程测量、岩土工程勘察、岩土工程设计、勘察劳务)、测量地理信息(大地测量、测绘航空摄影、摄影测量与遥感、地理信息系统工程、工程测量、不动产测绘、不动产测绘监理)、城乡规划编制(镇乡村庄总体规划、中小型建设工程项目规划)、工程咨询、建筑装饰工程专项工程设计业务以及建设工程总承包业务、市政设计等。
三、测区概况
本项目位于湖北省仙桃市主城区,摄区南北平均宽度为7公里,东西平均长度为10公里,占地面积约70平方公里左右。
飞行范围
项目区域内地势平坦,平均高差不超过15米,平均高程为25米,建筑物较为密集,老城区主要以3-8层老旧建筑物为主,南城新区主要以18-33层高层建筑为主,建模区域基本包含仙桃主城区范围。

现场航飞照片
本项目共计均匀布设和测绘像控点约500个,测量检查点300个,同时测区内各小区的规划竣工图作为检核图使用。
像控点测量
四、设备选用
飞行平台:大疆M300RTK无人机
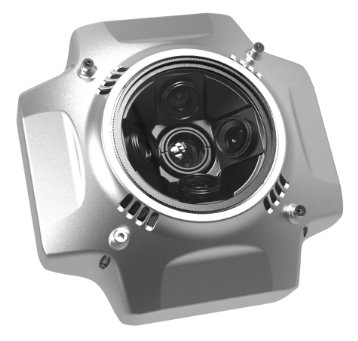
倾斜载荷:睿铂D2-PSDK相机
建模软件:Context capture
五、航飞情况
仙桃市主城区地势平坦,统一按照一个航摄分区进行航飞,航高根据业主方要求、航摄区域楼高、地面分辨率、现场周边情况综合考虑设计为150m。地面航高为150米时睿铂D2-PSDK正射相机的地面分辨率为2.3cm,像片航向重叠度设计为 80%,旁向重叠度设计为70%。
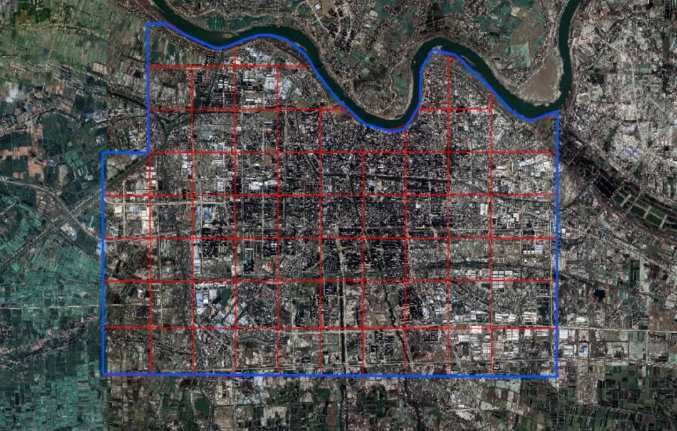
因作业区域面积较大,为保证无人机遥控信号的强度,本项目将整个航测区域划分为66个子摄区进行航飞,大部分子摄区面积为1平方公里,不规则子摄区面积不等,均不超过2平方公里。

测区划分
根据设计的重叠度和航高,使用大疆经纬M300RTK无人机搭载睿铂D2-PSDK相机每平方公里需要二架次航飞,本项目累计航飞约150个架次,累计获取约60万张照片,影像获取时间严格控制在上午10点至下午3点获取。
六、数据处理结果
6.1▪空三
本项目在空三前,主要采用的是睿铂的scanner预处理数据,scanner软件可以利用算法直接将当天获取的影像数据POS和相机参数生成对应的XML文件,生成的XML文件可以直接导入到建模软件进行空三,此功能大大节约了整理照片POS数据和导入POS文件的时间。
本项目数据处理硬件是采用高性能工作站(线程撕裂者 3970X 32核64线、256G DDR4 3000、14TG NVME m.2、24T 企业级机械硬盘、RTX3080、四口万兆光纤网卡intel X710-DA4、windows server 2019 标准版)来进行。
因本项目照片数据量较大,为提高空三效率和保证空三能正常进行,在进行空三处理前将所有影像合并为一个大区块,然后通过建模软件的照片分块功能将摄区影像共分成了32个空三子区块(见下图6),同时保证相邻空三子区块具有200米的重叠,并且相邻空三子区块的接边处保证有足够的像控点,平均每个空三子区块的照片数量约为二万张左右,然后将32个区块分别进行空三,每块区域平均空三时间为20个小时左右,32个区块空三加刺点共计用时六天时间。

空三分块图
6.2▪模型生产
在建模阶段为保证实景模型的色彩和色调的统一,本项目将完成空三后的32个空三子区块成果合并成为6个大区块来整体建模(经测试,CC建模软件的数据承载量大约为20万张照片左右,将32个区块合并为一个或四个区块会导致软件崩溃)。
为保证建模接边达到无缝对接和接边部分模型的完整性,确保这6个大区块的覆盖范围具有一定的重叠,同时,为方便后续在第三方软件平台展示浏览,同时将这6个大区块的建模原点和切块原点统一设置为同一值,使每个区块生成的tile文件具有唯一性,在建模完成后仅需要将六个区块生成的tile文件拷贝于一个文件夹即可生成完整的城市级模型。
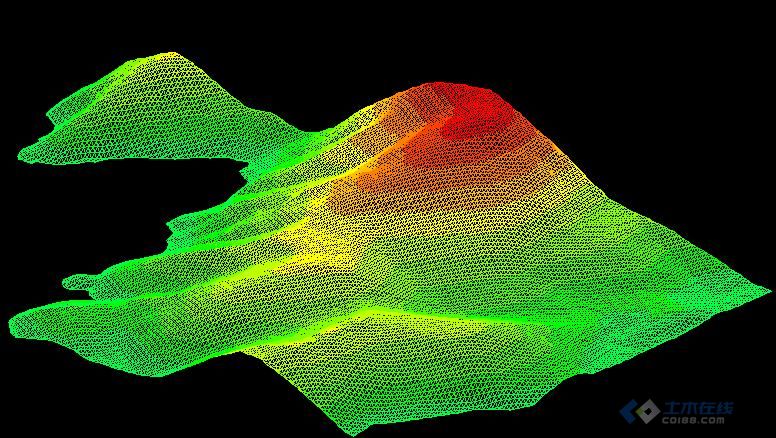
6.3▪模型截图



八、成果应用介绍
项目成果主要为老旧小区改造规划方案提供仿真环境和地理空间数据。目前,老旧小区改造项目设计方已经将该项目成果应用于项目前期的沟通,确定改造成本,全程可视化,管线设施、景观绿化、违建清理、外墙改造、室内外防水、电梯改造等方面。
如下分别是使用实景三维数据在进行违章建筑拆除前和拆除后设计方案对比。

违建拆除前

违建拆除后

增设电梯方案

层顶色彩设计
十、项目总结
基于倾斜摄影测量技术的三维建模能够大大提高作业效率、降低三维建模成本,具有无法比拟的优势,但是随着城市化建设水平的提高,实景三维模型建设也面临不少挑战。就本项目而言,需注意以下技术难点:
1、在城市高楼密集区飞行时需要寻找合适的场地保证遥控器信号连续不间断,以保障飞行安全,在必要的情况下可以选择在较高的楼顶进行起飞和降落。
2、在城市高楼密集区域进行倾斜摄影时,为使地面重叠度和高楼顶部重叠度能达到规定的重叠度,避免高楼模型效果出现空洞的情况,需要分别以地面和高楼顶为摄影基准面,在保证分辨率和重叠度的基础上各获取一次航飞数据,两次获取的数据需要分别空三后再合并建模。
3、利用多旋翼无人机在进行城市级倾斜影像的航摄时,应将航摄区域划分为规划形状的子摄区,划分的子摄区大小最好不超过4个架次飞行的区域,以保障飞行效率和后续空三的效果。
4、城市级别的影像数据量进行空三时需要将影像划分为子区块后再进行空三,各子区块的大小依据工作站的内存和配置来决定,最好不要超过3万张照片,各子区块间照片必须要有1倍以上航飞高度的重叠度,以保障区块合并时具有一定的影像重叠。
5、单个子区块在进行空三时,如果出现空三分层现象,要将此子区块各航飞架次分别空三后再合并为一个区块,此操作可减少空三分层现象。
6、城市级倾斜影像进行建模时,不能将各子区块单独进行建模,可以将各子区块合并为不超过20万张照片的大区块后,再进行建模,通过建模软件内部算法,可以有效避免模型色彩不均匀的效果。