测绘相机
技术中心
联系我们

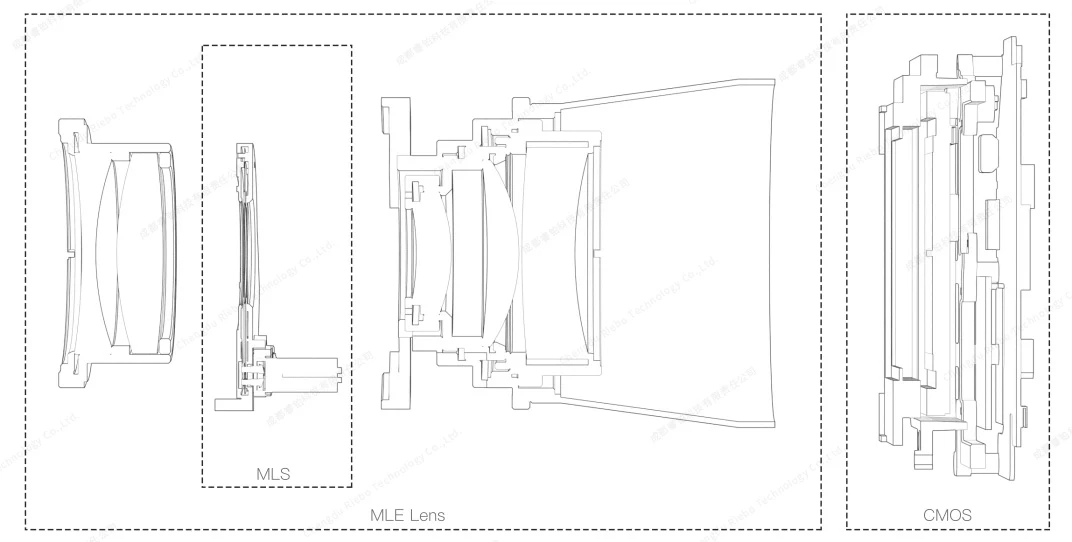
01MLE镜头
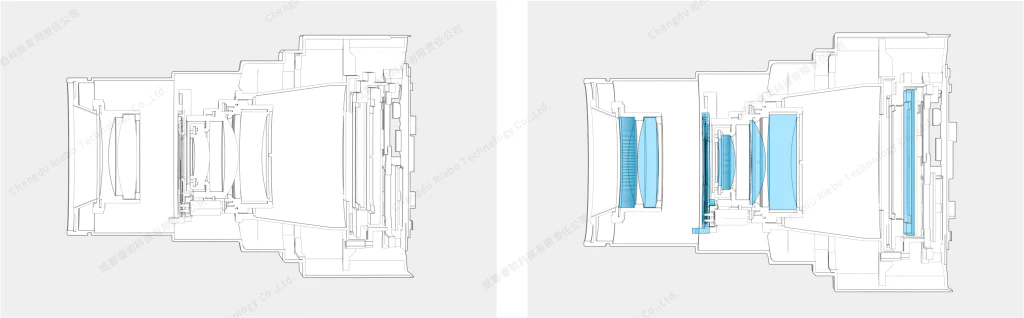
光学镜头作为相机成像最重要的关键器件之⼀,是决定航空影像质量的关键因素。
镜头的畸变、球差、⾊差等,畸变会决定模型的精度,⽐如: 球差会导致镜头的分辨率下降,⾊差会影响空三的匹配精度。
睿铂⾼端倾斜摄影相机均采⽤了⾮球⾯镜⽚,在控制镜头体积的情况下,同时采⽤了超低⾊散ED镜⽚,修正、消除慧差型成像,有效控制⾊差,把镜头畸变控制到千分之三以内,相⽐传统倾斜摄影镜头,匹配点数量综合提升了约10%~20%,并且重投影误差RMS能够减少约20%。
-
10%~20%匹配点数量提升
-
20%减少RMS重投影误差
-
3‰以内镜头畸变控制
02MLS快门
传统的倾斜摄影相机都采⽤了机械卷帘快⻔,卷帘快⻔在运动拍摄时会导致运动畸变,并且畸变程度跟相机画幅有关,相机画幅越⼤畸变越⼤,运动畸变对于航测数据采集来说有致命问题,会严重影响模型精度,并且机械卷帘快⻔还存在寿命短,低温环境下容易结冰等缺点。
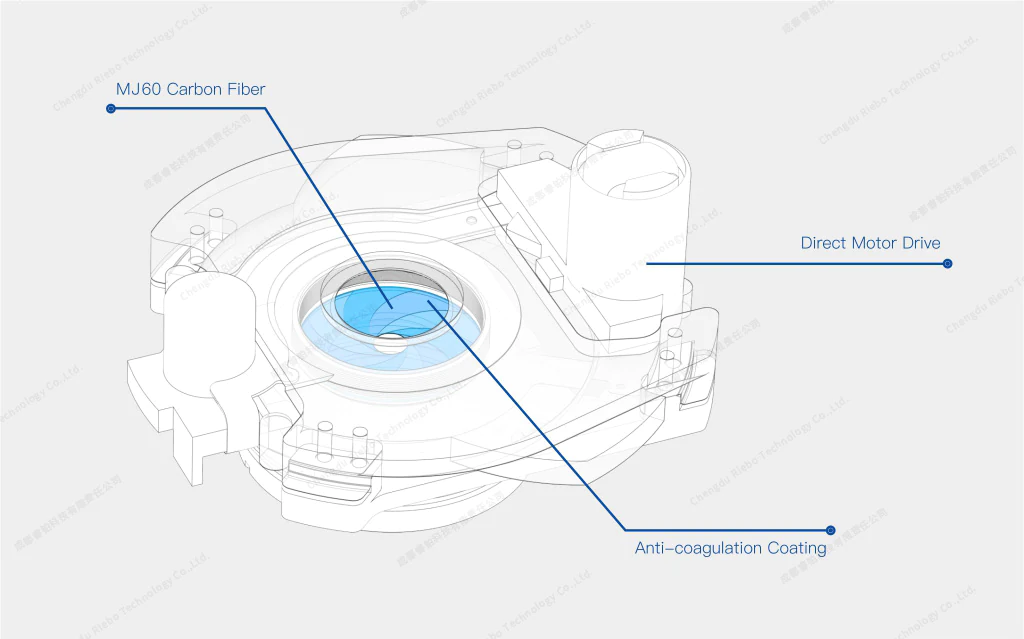
睿铂针对航测相机专⻔研发了⼀款机械⽆畸变快⻔MLS快⻔,该快⻔具有质量轻,体积⼩,孔径⼤,⽆运动畸变等优势。
-
 快⻔叶⽚采⽤了MJ60级碳纤维材料在极端作业环境下也能够保证50W次快⻔寿命
快⻔叶⽚采⽤了MJ60级碳纤维材料在极端作业环境下也能够保证50W次快⻔寿命 -
快⻔采⽤直驱⽅式,不需要弹簧蓄⼒能够⼤幅度减轻快⻔的损
-
睿铂MLS快⻔涂有防凝涂层,可以有效解决因低温导致快⻔凝结卡死的问题经过测试睿铂开发的MLS快⻔能够在-20℃~65℃温度环境下正常⼯作
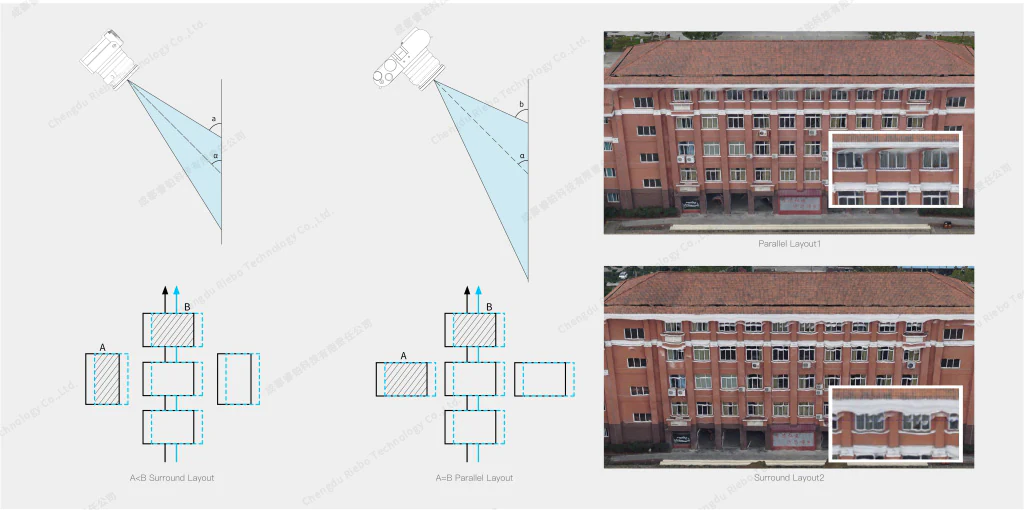
03平⾏式布局
传统五镜头倾斜摄影相机均采⽤环绕式布局,这种布局⽅式更加紧凑,相机的尺⼨更⼩,但是也存在以下问题:
- 如图所⽰,环绕式布局会造成两组侧视相机中,旁向的实际重叠度低于设计的理论重叠度 (A
- 环绕式布局对于中短焦距倾斜摄影相机影响较⼩,但对于⻓焦距相机来说,则影响较⼤,在传感器尺⼨相同的情况下,⻓焦距相机本⾝视场⻆ (FOV) ⼩于中短焦相机,那么两组⻓焦侧视相机⽅向拍摄到的建筑物会存在更多的拉花,影响建模效果。
04同步性
对于单镜头相机,快⻔曝光与差分模块之间的⾼度同步性是⾼精度航测的关键技术之⼀,传统航测采⽤消费级相机,同步⽅法是采⽤相机闪光灯热靴跟差分模块同步,但是实际上仍然有⾄少1ms以上的误差,⽐如⽆⼈机在以地速20m/s⻜⾏时,会直接导致约2cm的定位误差。
睿铂针对上述问题专⻔研发了⼀项在图像传感器的曝光时间内,任何时刻均能输出曝光信号⾄差分模块的技术,同步性时间优于50μs。
对于五镜头倾斜摄影相机,不仅要保证单个镜头与差分模块的⾼同步性,同时还需要保证五个相机也能够同步实现曝光,因为随着Lidar发展,倾斜摄影相机和Lidar集成是未来发展趋势之⼀,⽽集成的关键就是Lidar的⾼精度惯性导航模块能够精确给倾斜相机曝光时间打上时间戳,以实现Lidar和倾斜摄影相机的⾼度集成。
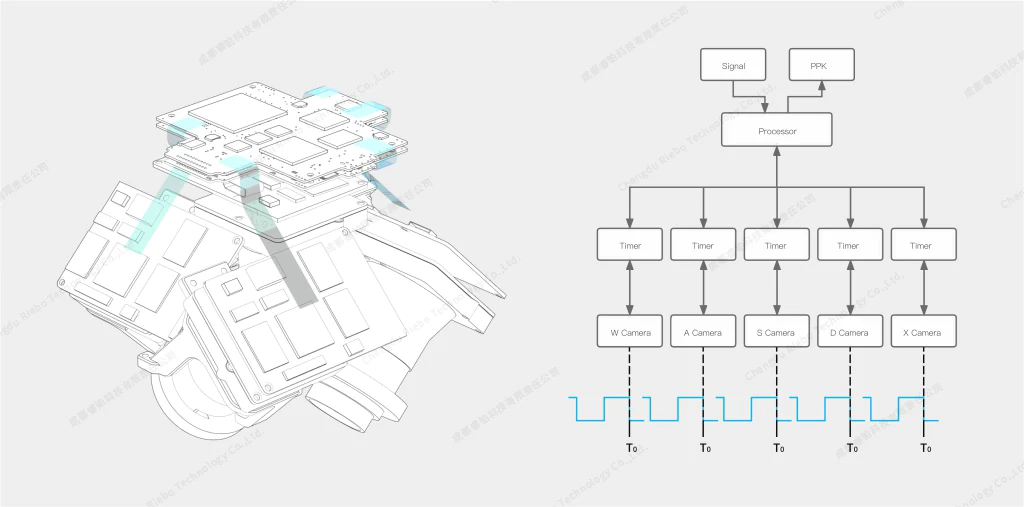
在航⻜过程中,五镜头倾斜摄影相机因为对地物拍摄纹理内容不⼀致,会随着时间积累导致相机的每个镜头不能在同⼀时间输出准确地输出快⻔信号,导致五个相机曝光不同步。
睿铂采⽤主动和被动同步控制技术解决了曝光不同步的问题,先通过主动控制晶振控制五个相机⼯作时序,针对相机曝光累计误差,采⽤反馈补偿的⽅式控制相机,实现五个相机⾼精度同步,以达到消除误差的⽬的,最终实现五个相机的⾼同步性。
05亮度矫正功能
在倾斜摄影中浅⾊建筑的模型⽐较容易出现花斑,除了航⻜过程中天⽓光影变化和软件贴图算法之外,相机本⾝会测光不准、五镜头之间有⾊差等问题,也会导致模型出现花斑,睿铂pros系列⾼端倾科摄影相机针对相机问题专⻔做了亮度矫正功能。
睿铂倾斜摄影相机每个镜头在装配前会做镜头快⻔的补偿和矫正⼯作,保证五镜头在同⼀光线强度下亮度差异不超过1%。
根据实际拍摄过程中光影和地物变化,睿铂相机会进⾏曝光平滑处理,当曝光值上⼀帧和下⼀帧有较⼤幅度的变化时,系统会认为这些是光影变化且系统不做⼲预,进⾏正常曝光。

06云台功能
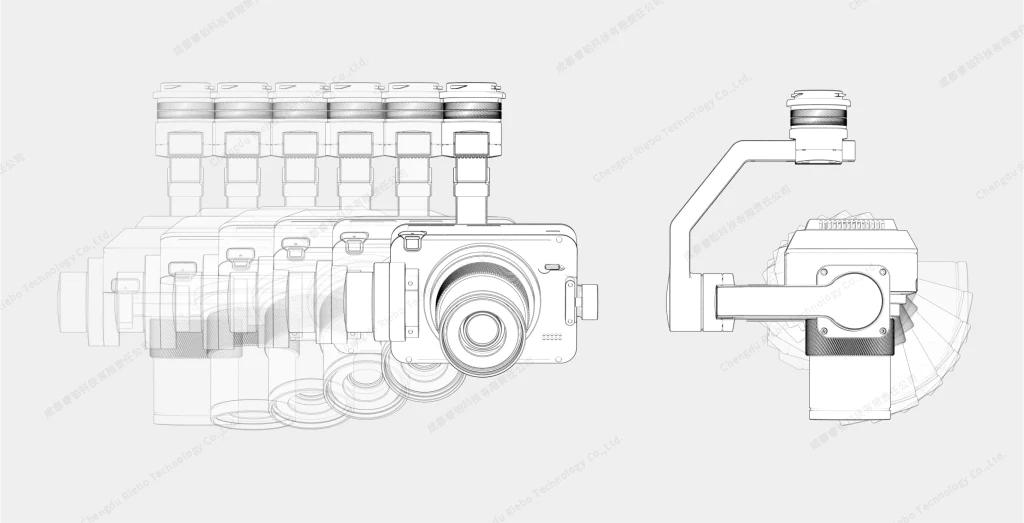
多旋翼无人机在飞行过程中会出现姿态倾斜现象,倾斜相机固定挂载在无人机上跟随无人机倾斜,导致相机姿态较差。同时可能因为飞机姿态的快速变化导致照片拉花。
为了解决这些问题,睿铂针对倾斜相机开发了可拆卸式的三轴稳定云台。
采用三轴稳定云台不仅可以增加倾斜相机拍摄稳定性,同时还扩展了倾斜相机用途,可以做近景摄影测量、优势摄影测量、环绕拍摄、同心环绕等多种拍摄模式。
07剔除冗余数据
根据倾斜相机结构特性与倾斜摄影技术原理,侧视相机通常会倾斜α⻆度,并且在外业作业时,为保证采集到⽬标测区边缘建筑物的纹理信息,所以航线规划时通常需要对航线进⾏外扩。
外扩的距离 L= |H×tanα|(H为航⾼),在⻜⾏外扩航线时,会产⽣⼤量朝⽬标测区外部拍摄的⽆效航⽚。这样就会导致总航⽚数量增加,同时也会使空三分层的概率增加,严重降低内业数据处理的效率。
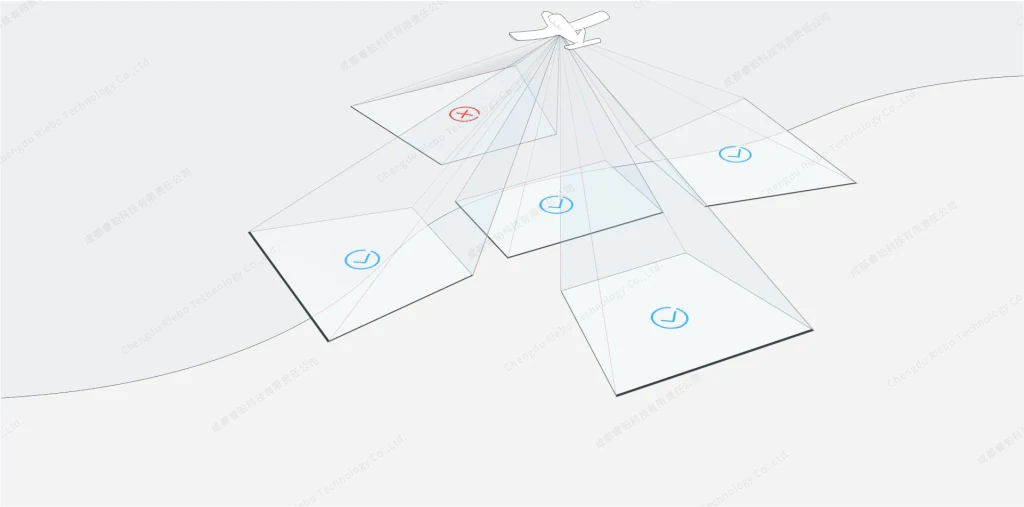
Sky Filter是睿铂专⻔针对这种情况⽽研发的⼀款软件,能够⾼效便捷地剔除⽬标测区外部拍摄的⽆效航⽚,保留测区内的有效航⽚,在保证项⽬精度和模型效果的同时,减少约30%-60%左右的总航⽚数,数据处理效率提⾼约50%。
-
总航⽚数减少30%~60%The total number of Images is reduced
-
数据处理效率提⾼20%Data processing efficiency is improved
08免像控精度
实现高精度免像控建模,除了控制光学镜头畸变、五相机曝光与PPK/RTK记录同步外,还需要各相机的高精度pos数据,而PPK/RTK模块通常与各相机存在一定距离,并且无人机在空中飞行时,姿态时刻都在变化,则无法获取准确的相机位置信息,会对免像控作业的精度产生一定影响。
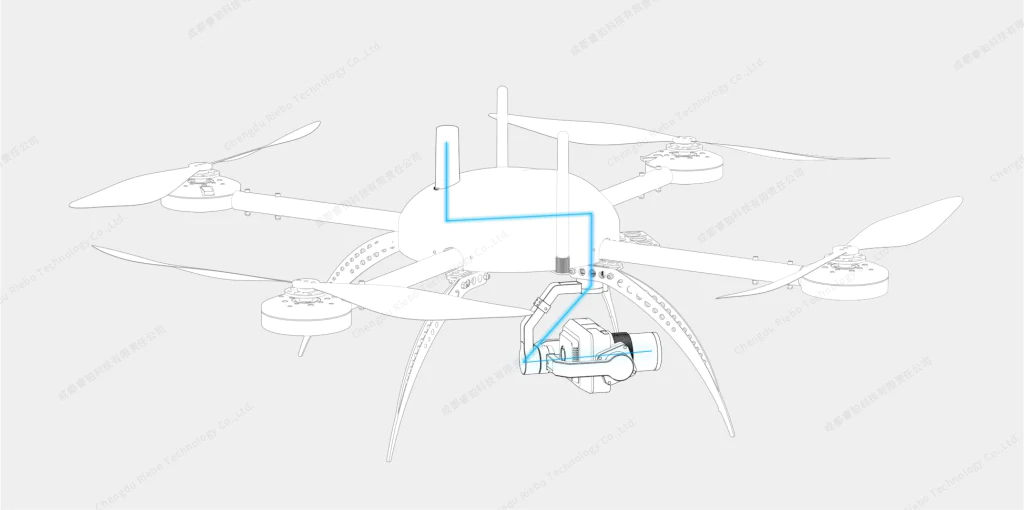
睿铂针对上述情况,开发了一套高精度pos解算算法,能够把无人机PPK/RTK模块的天线位置动态地精确解算到相机cmos成像中心,获取到各相机准确的位置信息并生成空三处理所需的区块文件,一键导入空三建模软件并实现免像控作业,保证项目精度要求。
9全新图像编码
睿铂采⽤更适合摄影测量相机的数据块划分算法和量化算法,在同样的动态范围下可以将影像⼤⼩压缩到常规影像的50%-70%。
同样的相机存储容量下能够存储更多的影像,减少⻜⾏途中因存储空间不⾜导致终⽌⻜⾏的情况,提⾼⻜⾏效率。还可降低相同影像数量对内业存储空间的占⽤,减少在硬盘上的投⼊,节省项⽬成本。
对于通过⽹络传输数据的场景,可节省30%-50%的传输时间,同样影像数量的条件下可降低对带宽的要求。
10开放相机控制SDK
睿铂科技全系列相机开放相机控制SDK,实现相机的快⻔速度、ISO、⽩平衡、存储空间、存储照⽚数量等数据的查询或者设置。
⽆⼈机⼚家可将相机的信息模块与控制模块集成到地⾯站中,⽆⼈机信息与相机信息能同时呈现给⽤⼾,提升⽤⼾作业效率和使⽤体验,解决了传统航测设备只能独⽴运⾏,⽆法与第三⽅⽆⼈机做深度集成的问题。


