前言
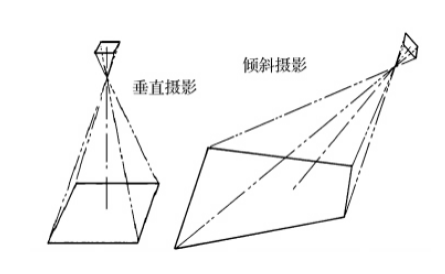
随着“实景三维中国”项目在各地试点和开展,作业场景相比“房地一体项目”单个测区作业面积越来越大,对倾斜摄影的要求从模型精度逐步转向了建模的效果。关于模型的色彩风格,很多客户对模型的颜色有一些困惑,有时候觉得模型偏黄(暖色)好,有时候又觉得模型偏蓝色(冷色)好。或者执着于影像的风格,有的客户觉得模型亮丽一些,比如红的更红,绿的更绿,模型色彩更加饱和一些好;有的客户觉得模型颜色要更加真实一些,实际肉眼观察模型什么颜色就应该什么颜色。那么这些不同颜色和风格的背景逻辑是什么原理?是否应该像摄影一样选择直出派和后期派?本期从原理上浅谈一下成像与色彩。
什么是颜色?什么是光的颜色?
薛定谔的《生命是什么》是这样描述这个问题的:“黄色光是什么?”如果你问的是一名物理学家,那么他会告诉你它是一种波长在590纳米(一纳米为十亿分之一米)范围内的横向电磁波。“黄色来自何处?”如果你继续问他这样的问题,那么他会说:“其实根本不存在黄色,只是由于我们健康的视网膜接触到这些振动的时候,自动就会产生黄色的感觉。”
所以颜色实际上是生物的主观的一种感受,光的本质是“电磁波”。
在《生命是什么》中继续介绍到颜色的感受和光的区别。
除此之外,我们还会继续问道:黄色的视觉印象是不是仅仅由波长邻近590纳米的光才会产生?事实上,答案不是这样的。760纳米的光波能产生红色,535纳米的光波能产生绿色,将这两种颜色的光波按照一定的比例混合起来,也会产生黄色的光波。这种黄色的光波与590纳米处的黄色光波在视觉上的感觉其实是一样的。它们在单色光照和混合光照下看起来完全是一样的,无法区别彼此。
所以从物理学家的角度来说:颜色本身并不真正存在,颜色并不是物质。如同音调,味道,气味,软硬,温度一样,是物质被人所感受到的某种属性,而对于生理学家来说,颜色是人脑处理过某物体发出的电磁波后的,分辨出的这种物体的属性。颜色是某物发出的可见光和人眼对可见光的响应二者共同决定的。通俗来说就是颜色是人类在主观上创造,把存在于我们周围的光波的震动解释为颜色。
人的主观是如何分辨颜色的?
人眼能够识别到光的波长范围大约在400nm~780nm区间,这个区间的光统称为可见光,可见光在电磁波光谱中只占有很少的一部分。
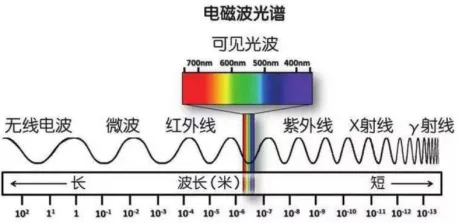
但是对于进化学来说人眼能够识别的可见光范围非常具有进化意义,因为太阳辐射能量主要就集中在可见光范围之内。
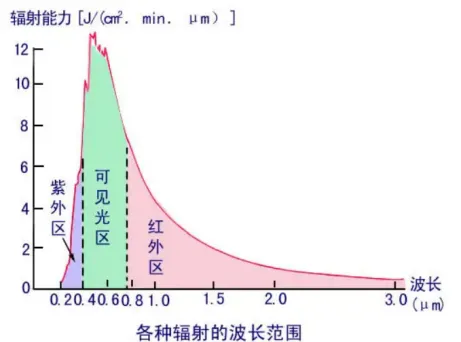
正常人眼的视网膜有三种锥状细胞。分别探测蓝光(450nm左右),绿光(480nm左右),红光(570nm左右),所以纯生理原理来说,人眼只能看到三种颜色,就是我们通常说的三基色:蓝绿红,之所以我们能够看到层次丰富的色彩是因为我们大脑对其加工,不同程度的基色组合起来,通过大脑的加工就形成了各种各样颜色的感受。
对震动频率的判断,相对来说人眼比人耳要灵敏得多,人眼能够轻松识别两种色彩差异,而人耳要经过大量的专业训练才能识别两种不同的音调;即便如此在自然界,人眼对颜色的识别还是非常匮乏的。蜜蜂多了两种紫外线的感受器,描点更精细。所以我们看到的颜色相同的花,在它们眼里颜色不一样,颜色丰富度也不一样。更神奇的是皮皮虾,它的眼睛里居然有10-20种不同波段光的接收器!简直就是生物光谱仪。可以想象,它对物体光谱的描述,比我们要精确的多了!
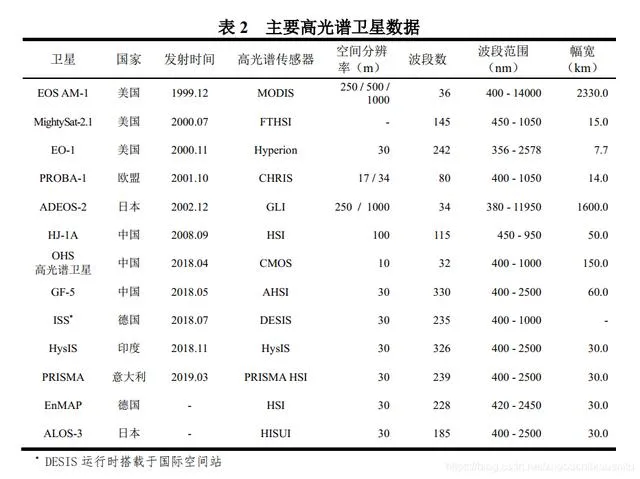
当然对光谱识别最强的还是当属:高光谱相机,2018年05月09日,中国高分五号卫星(Gaofen-5,GF-5)在我国太原卫星发射中心由长征四号丙运载火箭搭载,成功发射。共具有330个波段,光谱范围覆盖400 nm至2500 nm波长区域,包括150个V-NIR波段(光谱分辨率为5 nm)与180个SWIR波段(光谱分辨率为10nm);空间分辨率为30m。
相机怎么识别颜色?
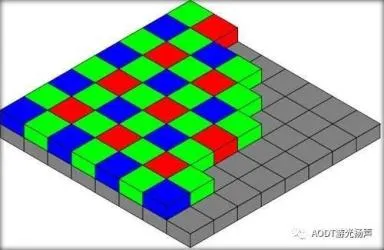
不同于人眼具有三种锥状细胞,能够辨别三种颜色,图像传感器只能记录光强(光电效应下光子产生电子的数量),不能感应色彩信息,那么彩色相机是怎么实现色彩记录的呢?实际上彩色数码相机也借鉴了仿生学的成果,借鉴了人眼的成像原理。由柯达科学家布莱斯·拜耳所发明,在图像传感器前端排布了一层拜耳滤色器(Bayer Filter),该滤色器使用了由红绿蓝过滤器组成的马赛克布局,这使得采用单个图像传感器就能拍摄出全彩色图像,目前几乎所有的数码相机、摄像机和手机摄像头都采用了这一技术。
他的具体原理是这样来实现的:
第一步:过滤;拜耳滤镜每个滤光点只能通过红、绿、蓝之中的一种颜色,这意味着在它下层的像素点只可能有三种颜色:红、绿、蓝,或者什么也没有(黑)。不同颜色的滤光点的排列是有规律的:市面上主流的CMOS图像传感器每个绿点的四周,分布着2个红点、2个蓝点、4个绿点。这意味着,整体上,绿点的数量是其他两种颜色点的两倍。这是因为研究显示人眼对绿色最敏感,所以滤光层的绿点最多。
第二步:记录;传感器上的滤镜分解成一个个单色的光,由传感器记录下每个点的光强度数值。
第三步:猜色(也叫去马赛克);如果一个像素只可能有三种颜色,那么怎么能拍出彩色照片呢?前面说了,每个滤光点周围有“规律”地分布其他颜色的滤光点,那么就有可能结合它们的值,判断出光线本来的颜色。以黄光为例,它由红光和绿光混合而成,那么通过滤光层以后,红点和绿点下面的像素都会有值,但是蓝点下面的像素没有值,因此看一个像素周围的颜色分布红色和绿色,但是没有蓝色,就可以推测出来这个像素点的本来颜色应该是黄色。每一个像素点计算之后就形成了一张彩色照片,数码相机就是通过拜耳滤镜和后期处理实现是五光十色的记录。
Foveon X3图像传感器
那么有没有不通过拜耳滤镜来实现色彩记录的数码相机呢?当然也有,那就是适马相机的Foveon X3图像传感器,不同于基于拜耳滤镜的相机,同一像素上只可记录RGB三种颜色中的一种,而适马foveon x3这块图像传感器可以在一个像素上捕捉全部色彩的图像传感器。Foveon X3在一个像素上通过不同的深度来感应色彩,最表面一层感应蓝色、第二层可以感应绿色,第三层感应红色。它是根据硅对不同波长光线的吸收效应来达到一个像素感应全部色彩信息。
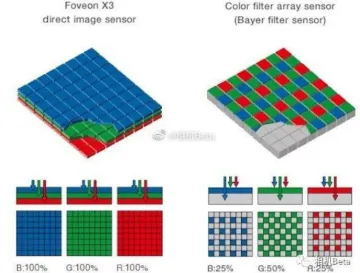
Foveon X3的三个感光层在不同的深度撷取RGB色光,于是可以确保RGB色光都被撷取100%。这样设计的好处就影像画质极好。影像鲜锐、色彩丰富,细节饱满。还可以避免摩尔效应等。主要缺点就是非常吃光,高感很差,耗电量也大。
色彩三要素
任何色彩都具备三个基本属性,即色相、饱和度、明度;
色相环中每种颜色对应不同的色相,色相也被称为色调,是由光的频率决定的。色相是由色彩的波长决定的,以红、橙、黄、绿、蓝、紫代表不同特性的色彩相貌,构成了色彩体系中的最基本色相。比如红色是一个色相,紫色又对应另一个色相。色相是色彩的首要特征,是区别各种不同色彩的最准确的标准。相机拜耳滤镜目的就是识别不同频率的光,感知色彩的相貌;

明度是指色彩的明亮程度。也叫明暗度、在无彩色中,明度最高的色为白色,明度最低的为黑色。中间存在一个从亮到暗的灰色系列。在有彩色中,任何一种纯度色都有着自己的明度特征。明度也就是指色彩的亮度和暗度,照射在物体上的白光越多,明度越高,色彩越接近白色;而白光越少,明度越低,越接近黑色。

饱和度,是指色彩的纯度。颜色的鲜艳程度称之为彩度。颜色越鲜艳,纯度越高,颜色越灰暗,纯度越低。原色纯度最高,彩度也最高,间色的纯度、彩度次于原色,复色的纯度和彩度均是最低的。即使是同一个红色,有西红柿鲜艳的红,也有红豆的暗红,同一色相中纯度最高的色彩称为纯色,随着灰度的加入,色彩纯度不断降低,色彩也由鲜艳变得浑浊。高纯度色彩充满张力与激情,低纯度色彩则具有低调稳重的感觉。

白平衡
相机白平衡就是相机还原白色精准度的能力,如果我们把一张白纸放在不同光线会出现不同的色调,比如:太阳光下更白、白炽灯下偏灰、黄昏时分偏黄,但是我们的眼睛仍然能识别这张白纸是白色的,因为人的眼睛非常强大。但是相机就不行,相机只会客观的记录环境的色彩,比如把白纸放在蜡烛光线下,相机拍摄出来的画面就会偏黄。而相机的白平衡,就是为了让实际环境中白色的物体在你拍摄时呈现出“真正”的白色。
色彩风格
一张航片的色彩风格简单来说,通过拜尔滤镜和猜色去感受色彩的色相,调整每个像素的色彩的亮度和饱和度的权值实现不同的色彩风格,最后通过白平衡保证在任何光照条件下都能够复原颜色真实的色彩;
对于航测客户来说,无论在什么光照条件下,不同型号的设备,都能够拍摄出相同色彩风格的航拍,当然这就是睿铂努力的方向。