一、从精度到效果
随着房地一体项目的结束,在现代测绘手段和国家重大需求的双重驱动下,“实景三维中国”建设成为市场主旋律。
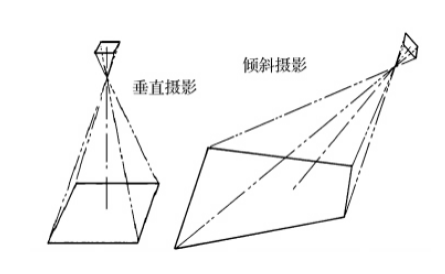
应用端对倾斜模型的需求,势必从精度转向展示效果。而倾斜摄影三维建模相比于其他建模手段,最大的优势就是能够反映地物的实际真实面貌,是现实世界的真实映射,是时空信息最直接的最有效的载体,是数字化管理的重要组成部分。真实,就是倾斜摄影最大的优势。
睿铂在产品研发中,最关注的就是建模效果,在之前文章中我们曾讨论过焦距与模型的关系。经验性地,我们认为焦距越长肯定模型效果越好,结果却发现:反而焦距短对模型的效果帮助更大。(感兴趣的客户点击本条链接查看相应文章)
那么提高像素能否实现更好的模型效果呢?经验性地大家应该都会这样认为:高像素=好模型。接下来我们通过实验展开验证。

二、实验设备
本次实验采用了睿铂旗舰级产品DG4Pros和Pros系列高像素相机DG6Pros,两款设备采用相同的镜头布局和挂载减震方式,主要区别有以下两点:
1、DG4Pros传感器尺寸为35.9×24mm,DG6Pros传感器尺寸为35.7×23.8mm。两款传感器尺寸基本一致,区别是DG4Pros单镜头像素4200万,DG6Pros单镜头像素6100万,DG6Pros传感器像素更高。
2、DG4Pros镜头焦距为40/60mm,DG6Pros镜头焦距为40/56mm,两款镜头焦距基本一致,区别是DG4Pros采用睿铂自主研发的镜头,DG6Pros为了控制成本,采用了目前市面现成的镜头方案。
.jpg)
三、低楼区域模型效果对比实验
1、实验区域:20米左右建筑;
2、航飞参数;航向/旁向重叠度为80%/70%,地面分辨率(GSD)1.5cm,DG4Pros航高为130米,DG6Pros航高为160米,航飞速度8.5m/s,相同航线方向。
3、航片情况:DG4Pros获取航片数量3170张,DG6Pros获取航片数量2065张。
4、模型对比:
左侧为DG4Pros模型效果,右侧为DG6Pros模型效果:


5、实验结果:两者模型相差不大,细节地方DG4Pros较优。
四、高楼区域模型效果对比实验
1、实验区域:70米左右建筑,包含20~40米中高层建筑;
2、航飞参数;向/旁向重叠度为80%/75%,地面分辨率(GSD)1.8cm,DG4Pros航高为160米,DG6Pros航高为190米,航飞速度8.5m/s,相同航线方向。
3、航片情况:DG4Pros获取航片数量3585张,DG6Pros获取航片数量2375张。
4、模型对比:
左侧为DG4Pros模型效果,右侧为DG6Pros模型效果:


5、实验结果:中低楼层两者模型相差不大,细节地方DG4Pros较优,高层区域DG6Pros效果完全比不上DG4Pros效果。
五、结论分析
通过上述实验,我们发现:在低矮建筑区域,DG6Pros效果和DG4Pros效果差异不大,但高楼区域DG4Pros就有显著模型效果优势。
与我们经验相矛盾的是:
其一,DG6Pros侧面焦距短,视场角FOV更大,其模型效果应该更好。
其二,DG6Pros像素密度更高,相同的分辨率可以飞的更高一些,楼顶的重叠度相对更高,其模型效果应该更好。
两种因素都有利于DG6Pros获得更佳的模型效果,但为什么DG6Pros反而要比DG4Pros效果更差?其核心原因是:DG6Pros真实分辨率并没有DG4Pros高。
六、真实分辨率差异
首先,实际场景的纹理可以认为是无限的,任何相机都无法穷尽,所以真实的纹理可以无限放大(当然也取决于研究的问题和对象的尺度)。
但大家都知道影像本身是无法无限放大的,当放大程度大于实际拍摄分辨率时,影像就变成通过插值形成的马赛克。(这就是打开三维模型后,滚轮无限放大时,模型已经成马赛克的原因)
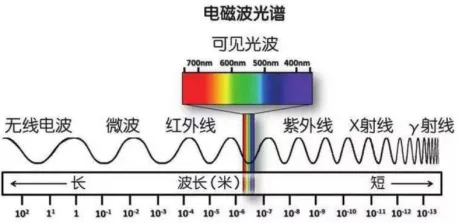
镜头成像的过程可以认为是一个平面二维的模拟信号采集过程,这个过程对于成像场景来说是低质的,其核心本质原因是在光线的波长和障碍物的尺寸相当的情况下,就会发生衍射现象。
DG6Pros虽然传感器像素更高,但是实际纹理通过光学组件之后投射到传感器尺寸之上,分辨率已经降低。DG6Pros这个木桶的短板,在镜头的分辨上,如果它没有得到提升,那么传感器再高的分辨率都没有意义。这个分界点可以由“瑞利判据”来决定。
七、瑞利判据(Rayleigh Criterion)
在成像光学系统中,分辨本领是衡量分开相邻两个物点的像的能力。由于衍射,系统所成的像不再是理想的几何点像,而是有一定大小的光斑(爱里斑),当两个物点过于靠近,其像斑重叠在一起,就可能分辨不出是两个物点的像。
即光学系统中存在着一个分辨极限,这个分辨极限通常采用瑞利提出的判据:当一个爱里斑的中心与另一个爱里斑的第一级暗环重合时,刚好能分辨出是两个像。
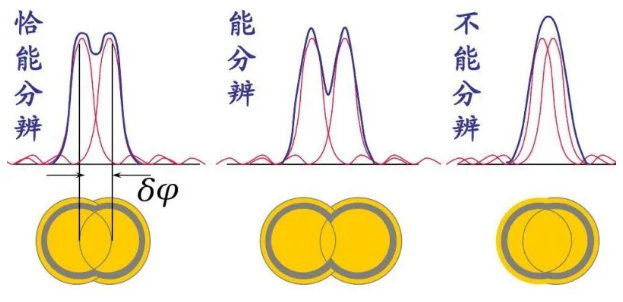
瑞利判据
由于光的衍射效应,镜头解析力总是有限的,为了衡量镜头的解析能力,直观的参数就是镜头的线对数(lp/mm),当然也可以从频谱上来衡量,就是调制传输函数(MTF曲线);
投影解析法计算光学镜头解析力
所以虽然DG6Pros像素更高,但是DG6Pros实际对纹理的映射分辨率其实并没有DG4Pros高。因为实际真实分辨率主要由传感器分辨率和光学镜头分辨率共同决定,两者缺一不可。
随着半导体加工技术的发展,可以使晶圆更高的像素密度,进而具备更高的像素。但光学镜头受限于衍射问题,已经到达一个瓶颈,要设计出超高解析度的光学镜头去“喂饱”这么高分辨率的传感器,以目前的技术水平,实现的难度非常大(除非体积无限放大)。这也是为什么一颗高分辨率的光学镜头价值可能会超过相机本身价格。
八、分析总结
通过上述实验和分析,相信大家应该明白,单纯地增加像素并不能实现更高的模型效果。其实通过逻辑也很好判断,如果高像素就能更好的建模效果,那么还不如直接使用五个小米一亿像素的手机。
摄影圈有句俗语:底大一级压死人。其实无论像素多高,只要传感器更大,就是降维打击。高像素实现更好模型效果的前提,是必须要有可适应的镜头和足够大的像元,才能支持相机以足够的解析力映射实际纹理。
九、后记
虽然这篇文章可能引起一些争议,但很多客户经常在咨询我们,为了解答他们的疑惑,所以才有了这篇文章。希望客户在做产品调研时,要以结果或者某些客观参数来(例如RMS、匹配点云数量)驱动,而不是仅仅关注参数。
毕竟参数本身就具有迷惑性,从参数来判断一个产品往往很不准确,大家又不是没有吃过这方面亏,对吧!