一、项目背景
西安城墙位于陕西省西安市中心,是第一批全国重点文物保护单位、国家5A级旅游景区,是我国古代城垣建筑中保留至今最为完整的一处,也是当今世界现存规模最大、最完整的古城墙。西安城墙墙高12米,顶宽12~14米,底宽15~18米,轮廓呈封闭的长方形,周长13.74千米。
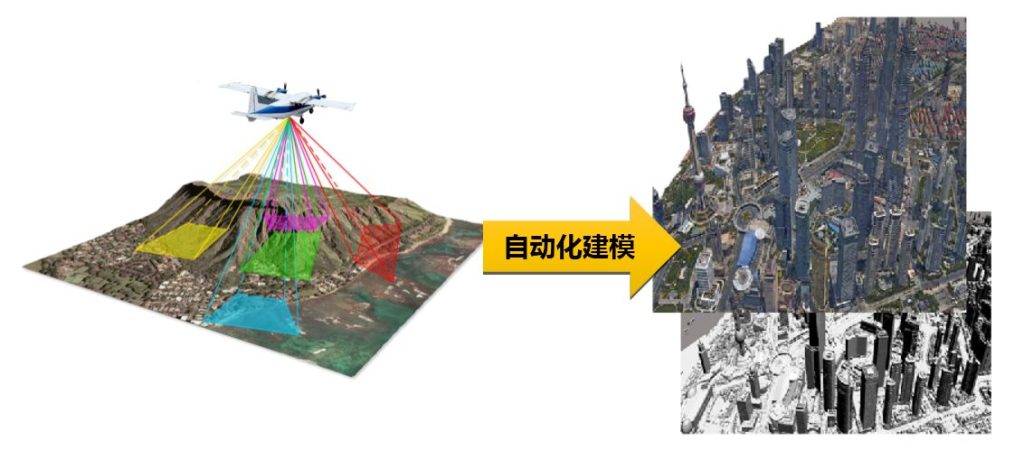
古城墙是西安市城市整体布局的重要构成部分,承载着我国传统的历史文化。因此,对于古城墙的保护显得尤为重要。无人机近景摄影测量技术能够高效、准确、无接触地获取古城墙及附属建筑物的影像数据,并通过计算机视觉技术对古城墙及建筑物进行三维重建,可以实现对西安古城墙的数字化及信息化,为古城墙的管理保护工作提供崭新的思路和方向。
二、测区概况
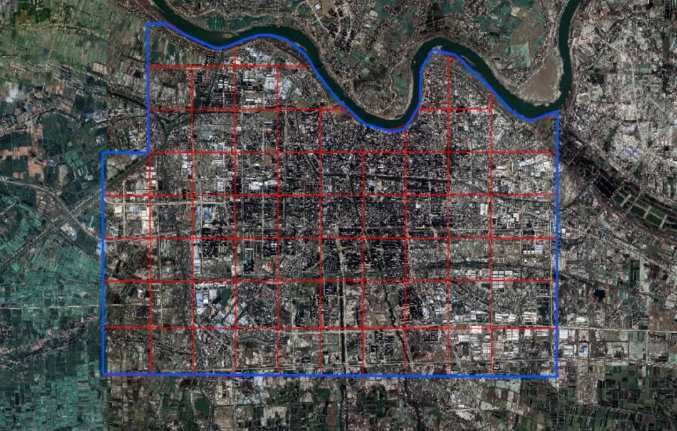
项目测区位于陕西省西安市市中心,测量目标为西安市古城墙及附属的古建筑、构筑物等,全长约13.74km,有效建模区域面积约为14km²。测区内地势较为平坦,部分区域有百米高楼。
考虑到光线照射角度及背阴面阴影大小,规定无人机环绕飞行作业时间为10:00~15:00,在该时间段内,太阳高度角较高,光线阴影较小,适合飞行。同时,为了避免无人机贴近摄影测量影像数据采集过程中造成过曝现象,规定贴近摄影测量作业时间为9:30~10:00和15:00~16:00。
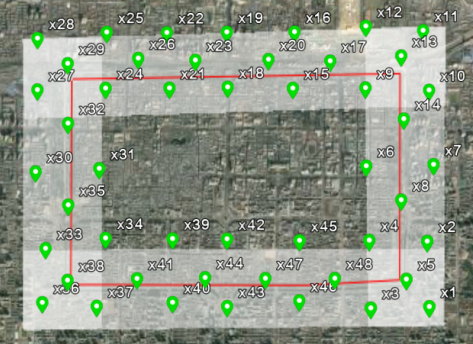
测区内共布设地面像控点48个,考虑到古城墙附近对于环境保护的需求,因此,像控点全部选择点位清晰且易辨认的地面斑马线、道路指示线等角点,像控点分布如下图所示。
三、项目设备选用
由于此次拍摄的目标物包括城墙、城门、闸楼、城楼、箭楼、角楼、敌楼、女墙、马面、瓮城以及城墙内侧民房及外侧高层建筑物等,其中闸楼、箭楼、角楼、敌楼等结构复杂,多为通柱式结构,不仅包含平台结构,还包含暗层、楼面以及挑台等结构。复杂的结构和细致的纹理给摄影测量工作带来了巨大的挑战。
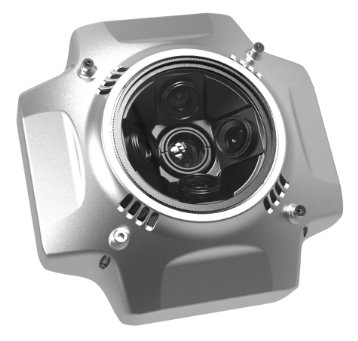
为了获取测区的高质量航片,兼顾无人机的安全性,项目组选用设备为大疆M300 RTK无人机和睿铂M6 Pros近景摄影测量相机。M300 RTK无人机,抗风性能优异,续航时间长,且具备RTK厘米级定位精度,可实现精确地航线作业及悬停作业。
M6 Pros量测型相机是睿铂最新研发出的多用途产品,配备三轴增稳云台,稳定性非常好,可以有效改正无人机飞行时姿态变化引起的成像时刻姿态偏移,保证曝光时刻的成像姿态与航线预设的姿态一致。

M6 Pros可直接使用DJI Pilot执行航点任务,具备实时参数设置、实时图像显示功能,同时,在相机控制方面也非常方便,可直接使用M300遥控器控制相机拍照及录像。既可以用来生产正射图像,也可以用于近景摄影测量建立高质量精细化模型,可保证5mm高分辨率的情况下离建筑物50m,在保证模型效果的同时也保证了飞行安全。
四、航线规划设计
此次飞行航线设计使用Way Point Master完成,软件可提供十余种航线规划方案,包括环绕飞行、仿地飞行、带状飞行、雷达测绘、立面测绘等多种外业飞行作业模式,根据作业类型不同,提供适配作业方案。
城墙南永宁门段环绕航线示意图
使用WPM软件对测区进行环绕航线设计,相较于传统的五镜头作业,可以大大的减少倾斜摄影采集的影像数量,同时拍摄角度也更加丰富。此外,由于测区内建筑物密集,高且高楼建筑物较多,因此在环绕飞行后,再次使用M6 Pros相机对测区进行正射数据采集,以丰富建筑物的纹理信息,减少模型空洞的产生。
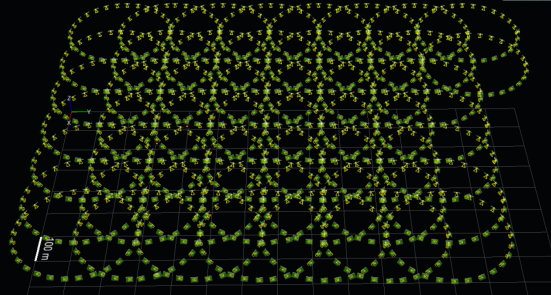
城墙南永宁门段环绕航线示意图2
五、外业航飞概况
本次项目外业采集工作分两部分进行,首先,使用M300+M6Pros+WPM对测区进行整体环绕式飞行,获取整个测区的影像数据。设计航高为150米,地面分辨率(相机俯仰角-45°情况下的真实分辨率)约为2cm。

箭楼和城墙数据采集
其次,使用M300+M6Pros对城墙、城门、闸楼、城楼、箭楼、角楼、敌楼、女墙、马面、瓮城等进行贴近飞行,拍摄距离45m左右,分辨率约为4mm。西安城墙永宁门段有效建模面积0.7km²,环绕飞行采集影像1481张,正射影像634张,永宁门手动补拍照片210张,总计照片数2325张。

城楼侧面数据采集
六、航飞数据处理
以永宁门段进行说明,西安城墙永宁门段有效建模面积0.7km²,环绕飞行采集影像1481张,正射影像634张,永宁门手动补拍照片210张,总计照片数2325张。本次数据处理采用中测智绘Mirauge 3D软件,空三一次性通过,空三解算时间约35min,建模时间约3小时。
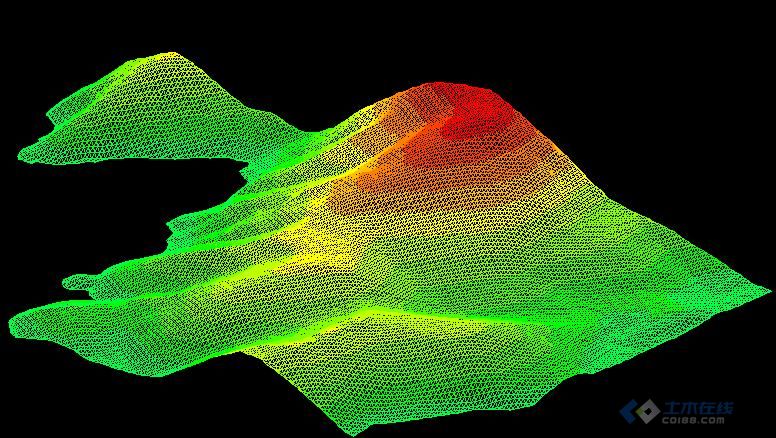
七、模型效果
7.1▪原始模型效果



7.2▪修饰后模型效果

八、项目总结
从飞行情况来看,环绕飞行高度150m,地面分辨率可达2cm,贴近飞行距目标物距离45m,分辨率可达4mm,完全可满足项目需求。并且,环绕飞行相较于传统的五镜头沿航线飞行,获取的影像数据可以减少4/5左右,大大减少了内业的数据处理压力,解决了外业一直拍,内业不出活的尴尬局面。
在整体效果方面,M6 Pros的参数设置融合了睿铂多年的作业经验,相机参数波动被约束在一个相对固定的范围,可在大部分环境下保证数据采集的质量。
细节上,M6 Pros的COMS尺寸为35.7mm×23.8mm,像幅面积是精灵4 RTK的7.3倍,更大的画幅可带来更好的宽容度和高感,航片采集的城楼及城墙细节内容会更加丰富,其作业效率也会越高
九、单位简介
南京瞰景威尔奇空间技术有限公司是一家集测绘、地理信息领域的技术型企业。公司拥有专业的团队和核心的技术产品,专注于影像及三维激光技术,提供实景三维GIS服务。公司业务涵盖测绘地理信息装备销售服务、实景三维建模全流程工程服务、空间数据应用服务和实景三维建模技术输出。公司秉持“工匠”精神,切实为用户提供实用、高效、简单的产品和服务。