倾斜摄影测量技术(Oblique Photogrammetry)通过多角度拍摄目标物体或场景,结合计算机视觉和摄影测量算法,实现三维模型的快速重建。传统倾斜摄影依赖地面控制点(GCPs)进行高精度定位,而免像控技术(Ground Control-Free Photogrammetry)通过GNSS/IMU高精度定位、多视角匹配和智能算法优化,减少或完全摆脱对地面控制点的依赖,大幅提升作业效率。以下是其核心原理及技术支撑:
1. GNSS与IMU的融合定位
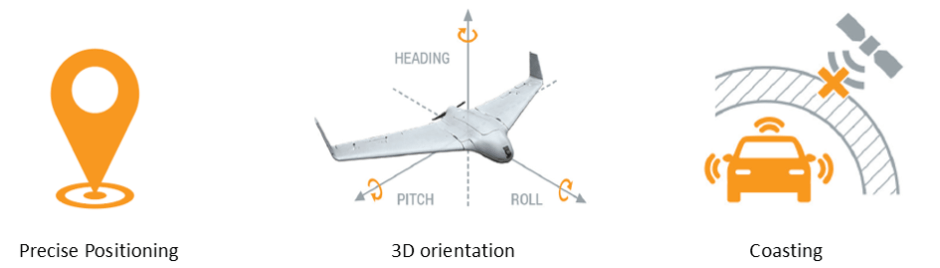
- GNSS提供高精度的绝对位置信息(经度、纬度、海拔),而IMU通过加速度计和陀螺仪提供相对姿态信息(俯仰角、偏航角、横滚角)。两者结合可实时计算相机的外方位元素(即相机在空间中的位置与姿态),无需依赖地面控制点。
- 例如,睿铂R10M相机通过GNSS/INS系统同步记录每张照片的位置和姿态信息,直接用于三维重建。这种技术在免像控系统中被称为“后差分”或“前差分”处理,通过差分算法消除GNSS信号误差,提高定位精度。
2. 多镜头协同与空间信息采集
- 倾斜摄影相机通常搭载多镜头(如5个镜头),分别从垂直、倾斜等不同角度拍摄地面目标。多镜头的协同工作可覆盖更广的视角,减少对单点控制的依赖。例如,倾斜摄影相机通过5个CMOS镜头同时拍摄,从45°倾斜角获取地物侧面纹理信息,弥补传统垂直摄影的局限。
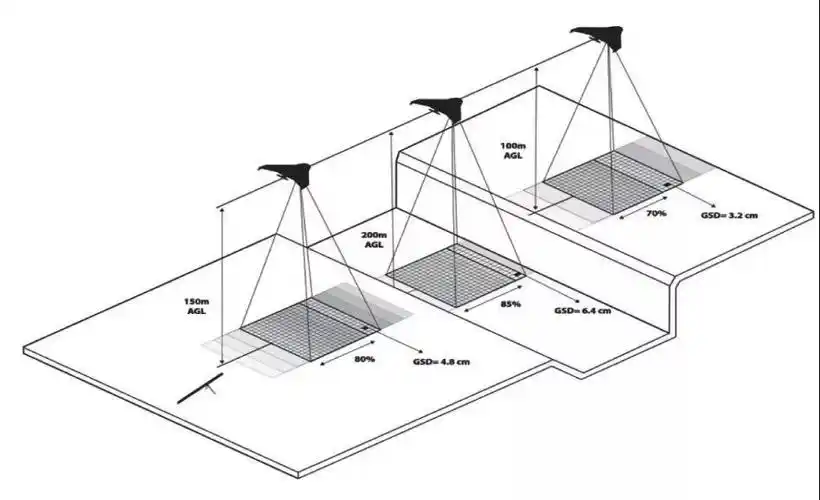
- 多视角影像的重叠区域(航向重叠度70-80%,旁向重叠度70-80%)进一步增强了数据冗余,提升三维重建的鲁棒性。
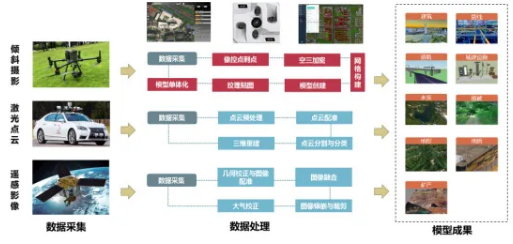
3. 数据处理算法的优化
- 空三加密(空中三角测量)通过GNSS/IMU提供的外方位元素,直接进行影像匹配与重建,无需依赖地面控制点。例如,基于共线方程的空三加密算法可利用多视角影像的几何关系,快速生成点云和三维模型。
- 密集匹配算法(如CMVS、PMVS)结合多镜头的高分辨率影像,自动提取特征点并进行纹理映射,进一步减少对控制点的依赖。
4. 免像控的优势与意义
- 降低外业成本:无需布设地面控制点,节省人力与时间成本,尤其适用于复杂地形或难以到达区域。
- 提高作业效率:通过实时图传和自动化建模软件(如Smart3D),实现快速三维建模,适用于城市规划、灾害监测等场景。
- 增强精度与鲁棒性:GNSS/IMU的融合定位可提供亚米级精度,结合多镜头数据,显著提升模型的几何精度与纹理细节。
5. 技术挑战与限制
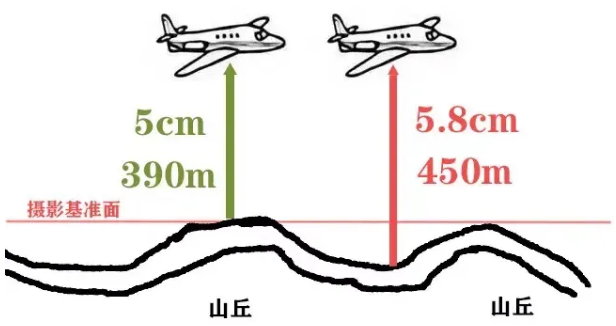
- GNSS信号遮挡:在高海拔、地下或密集建筑区域,GNSS信号可能受干扰,需依赖IMU的惯性数据作为补充。
- IMU漂移误差:长期使用IMU可能导致姿态数据漂移,需通过GNSS定期校正。
- 算法依赖性:免像控技术对数据处理算法的鲁棒性要求较高,需优化特征匹配与空三加密的精度。
总结
倾斜摄影的免像控原理本质上是通过GNSS/IMU融合定位、多镜头协同采集及高效数据处理算法,实现无需地面控制点的高精度三维重建。这一技术突破了传统摄影测量的局限,为测绘、建筑、城市规划等领域提供了更高效、灵活的解决方案。