在倾斜摄影测量项目中,航线规划的严谨性直接决定了最终三维模型的质量与完整性。照片覆盖不全、模型空洞、纹理模糊或分辨率不达标等问题,往往源于规划阶段对关键细节的疏忽。本文将系统梳理倾斜摄影无人机航线规划的核心流程与关键要点,旨在提升作业效率与成果可靠性。
一、规划前期:明确需求与环境评估
规划伊始,必须精准定义项目目标。精度要求是首要考量因素,它决定了飞行高度与地面分辨率(GSD)。例如,古建筑测绘需识别瓦片刻字可能需要0.5cm GSD,而城市级大范围建模可能2-3cm GSD即可满足。务必与客户确认需辨识的最小目标尺寸。
测区范围的划定同样关键。仅依据二维地图边界规划极易导致建筑边缘立面数据缺失,因倾斜镜头需要额外空间调整角度。建议将规划范围在卫星图上向外扩展约20%,确保边缘建筑能被完整覆盖。
环境风险评估不可或缺。高压线、通讯塔等高耸且细小的障碍物在二维地图上难以辨识,但对飞行安全构成严重威胁。利用专业软件(如Litchi)导入障碍物KML文件,或在规划工具中手动标注并设置安全避让距离,是必要步骤。
二、航线设计核心:多角度覆盖与参数优化
倾斜摄影的本质在于同时获取目标物的顶视及四个侧立面信息。航线设计的核心是确保相机能全方位捕捉地物。
1. 飞行平台与航线模式选择
* 多旋翼搭载五镜头云台 :单次飞行同步获取顶、前、后、左、右五个视角。优势是效率高,但对飞行稳定性要求极高,航线需严格保持平直,轻微偏移即可能导致多视角影像错位,增加后期空三难度。

五镜头倾斜摄影相机
* 单镜头无人机多架次飞行:成本较低,但需规划多组交叉航线。通常需执行两组正交方向的平行航线(如一组南北向,一组东西向)。关键点:两组航线必须保持完全一致的飞行高度(误差控制在≤2米内),否则将导致不同角度影像的高程基准不一致,影响模型拼接。
2. 核心参数设定
* 重叠率 (Overlap):
* 航向重叠 (Along-track Overlap):推荐75%。低于70%增加空三失败或模型出现孔洞的风险;高于85%则显著增加数据量与处理负担,边际效益递减。
* 旁向重叠 (Across-track Overlap):推荐80%。这对保证建筑侧面影像的连续性和完整性至关重要,尤其在单镜头多架次方案中。
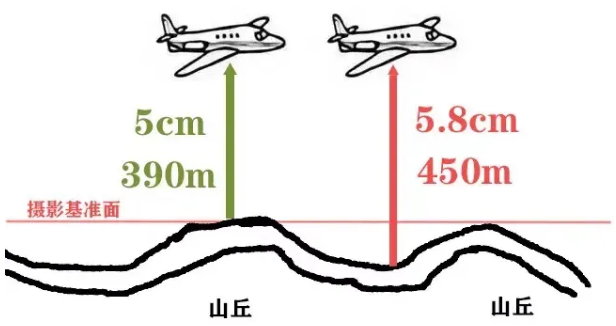
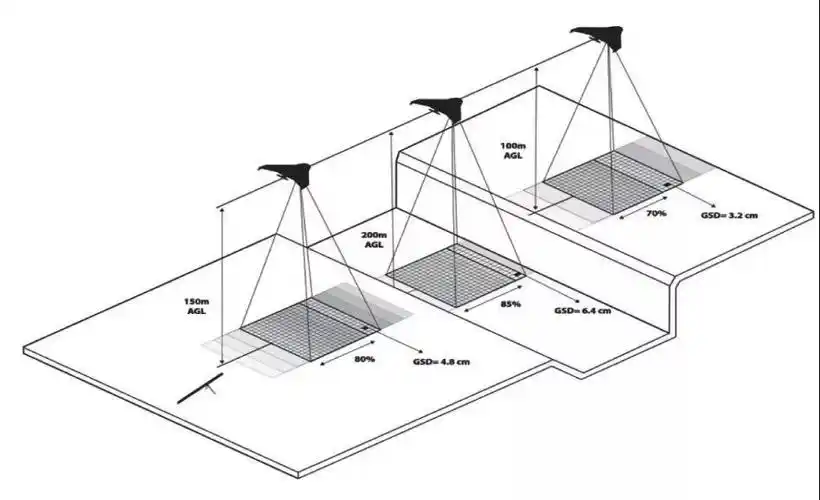
* 飞行高度 (Flight Height):高度与地面分辨率(GSD)直接相关。计算公式为:GSD = (传感器宽度 × 飞行高度) / 焦距。例如,使用全画幅相机(传感器宽度35.9mm)配合24mm镜头,欲获得1cm GSD,飞行高度需控制在≈67米(计算时注意单位统一)。精确计算是避免返飞的基础。
* 镜头俯仰角 (Camera Tilt Angle):
* 建筑密集区域:建议采用-45°俯角,以充分捕捉建筑中下部立面。
* 开阔区域或低矮建筑:可采用-30°俯角,在保证立面覆盖的前提下提高飞行效率。
* 高级功能:部分规划软件(如DJI Pilot)支持基于预设区域或航点的动态俯仰角设置。可在飞临建筑区时自动设置为-45°,在开阔地带自动恢复至-30°,优化整体作业效率。
3. 复杂地形处理策略
测区内存在显著高差时,固定高度飞行会导致地面分辨率不均和模型失真。
* 仿地飞行 (Terrain Following):这是首选方案。需提前获取测区高精度DEM(数字高程模型)数据,并导入飞行规划软件(如大疆智图)。无人机将根据地形起伏自动调整离地高度,保持恒定的GSD。
* 分区与分层飞行:对于包含极高建筑(如摩天大楼群)的测区,可将其划分为独立子区。在低层区域使用较低高度(如80米)飞行,在高层区域则提升飞行高度(如120米)。这避免了在低高度飞行高层区域时镜头过度仰视导致的影像扭曲。
三、合规性与设备保障
1. 空域合规性
国内作业必须严格遵守空域管理规定,通过民用无人驾驶航空器综合管理平台 (UOM: https://uom.caac.gov.cn) 进行飞行计划申请与报备。
* 务必在申请中明确选择“倾斜摄影”作为作业类型。
* 若作业区域存在限高要求,需在申请备注中详细说明倾斜摄影多角度拍摄的技术必要性,申请高度豁免(例如:“因倾斜摄影作业需多角度采集数据,申请在XX区域豁免限高至XX米”),并附上项目相关证明文件(如合同、委托函),以提高审批通过率。
2. 设备稳定性与抗干扰
倾斜摄影对定位精度要求苛刻,且易受环境干扰。
* 起降点选择:远离大型金属结构(钢架、铁皮厂房等)至少50米,以减小磁场对指南针和GPS的干扰。
* 增强链路:在城区、楼群或电磁复杂环境作业,强烈建议为遥控器加装4G增强图传模块 (如DJI Cellular模块),利用蜂窝网络辅助维持控制与图传链路稳定,防止失联。
* 高精度定位 (RTK/PPK):普通GNSS定位的米级漂移在倾斜摄影中是灾难性的,会导致多角度影像无法精确对齐。RTK实时差分定位是确保厘米级精度的必备条件。飞行前务必确认飞控已获得稳定的“FIX” (固定解) 状态,避免使用“FLOAT” (浮点解) 或“DGPS” (差分)。
四、飞行执行与监控要点
-
起飞前校验:完成所有常规检查(电池、传感器校准)后,重点确认RTK状态为“FIX”。任何定位精度的妥协都将直接影响模型质量。
-
任务中断续飞:因电量或其他原因中断任务后,续飞时起始点必须与前次任务的结束点保持至少10%的航向重叠。直接衔接会导致拼接缝隙。
-
飞行过程监控:除常规关注电量、高度、姿态外,实时监控各镜头照片计数器至关重要。对于五镜头设备,每个航点应触发五个镜头同步拍摄。若发现某个镜头计数停滞,需立即暂停任务检查(SD卡状态、镜头故障等),避免大规模数据缺失。
五、飞行后数据核查与归档
-
现场快速检查:利用笔记本电脑或平板快速预览部分影像,重点检查:
-
高光/阴影区域曝光是否合理(是否存在大面积过曝或欠曝)。
-
相邻影像间是否存在明显位移(可能预示RTK信号波动或定位问题)。
-
目标区域(尤其是建筑立面)是否被完整覆盖。发现严重问题可及时补飞。
-
-
结构化数据归档:建立清晰的文件命名与存储结构,例如:
[日期]_[项目名称]_[飞行方向]_[区块编号](如:20240704_古建测绘_南北向_01)。规范的归档能极大提升后期处理效率,减少混乱。
结语:精度源于严谨规划
倾斜摄影航线规划的核心,在于通过精细的二维航线设计实现对三维空间的无死角覆盖。初次尝试建议选择小范围单体建筑进行测试飞行,重点验证墙角、屋檐、立面等关键区域的影像完整性与纹理质量。进阶作业中,利用Pix4Dmatic等软件在飞行间隙对部分数据进行空三快速预览,能有效在现场发现覆盖漏洞或参数问题,显著降低返工风险。牢记关键参数组合(航向重叠75%,旁向重叠80%,建筑区俯角-45°)是保障模型完整性的基础。