一、项目背景
1.1项目背景
为贯彻落实中央、国务院关于实施乡村振兴战略、关于“扎实推进房地一体的农村集体建设用地和宅基地使用权确权登记颁证,完善农民闲置宅基地和闲置农房政策,探索宅基地所有权、资格权、使用权‘三权分置’”的要求,章丘区开展农村房地一体不动产确权登记和权籍调查工作。
1.2工作内容
本项目主要工作内容为完成辖区内890个村、20余万户的实景三维模型和正射影像图、数字线划图,作为下一步权籍调查的工作底图。
 测区范围
测区范围
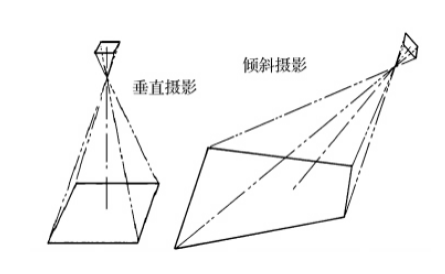
1)无人机倾斜摄影测量
利用我院多旋翼无人机搭载五镜头倾斜相机对章丘区所有农村不动产区域,进行倾斜摄影三维拍摄测量,获取各村庄的分辨率优于0.015m的地面影像。
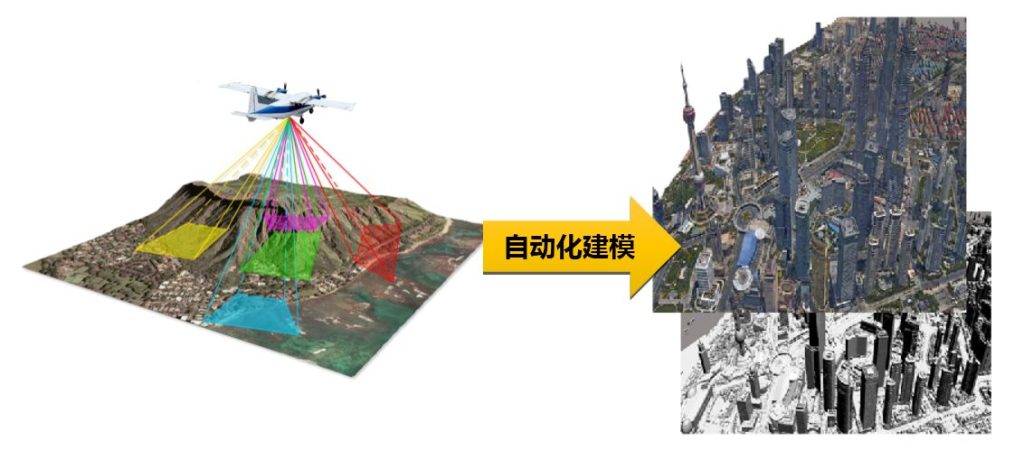
2)倾斜三维模型制作
利用ContextCapture实景三维建模软件对倾斜影像数据进行处理,制作章丘辖区内890个村、20余万户的实景三维模型。
3)制作不动产测绘初步底图
利用实景三维模型,采用数字影像一体化测图模式进行数据的采集和更新,提取调查宅基地及建筑物落地轮廓以及重要道路信息,制作数字线划图,作为农村宗地及房屋分户测绘的初步调查底图。
二、设备选用与人员安排
2.1核心设备介绍

RIY-DG4pro是目前睿铂技术含量最高的一款全画幅倾斜摄影相机,内置双高3斯结构镜头和超低色散非球面镜片,可补偿像差、提高锐度值、降低色散,并且将光学镜头畸变率严格控制到千分之四以内。并且相机外形尺寸控制得很好,同时内置散热及除尘系统,拍照反馈系统,增强了相机环境适应能力与安全性能。相机还开放了参数调节功能,让外业人员可根据实际情况调节相机参数,以获得更优质的原始数据。
2.2人员投入
本项目拟投入人员106人。其中:项目部管理人员7名,除财务核算员外其他人员均参与生产;航摄飞行投入32人;模型制作投入8人;立体采集投入50人;精度检核投入6人;内部验收及成果上交投入10人。项目实施过程中,根据各个环节的进度情况实时监控、动态调整,确保项目顺利进行。
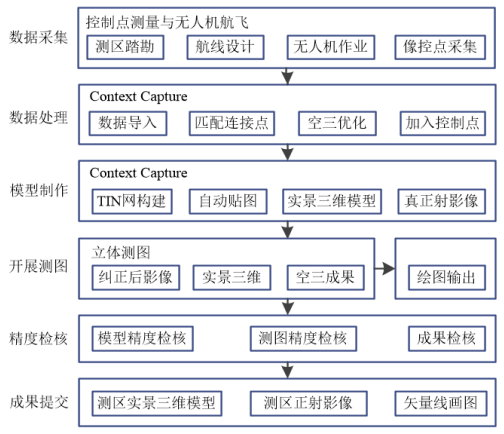
三、技术流程
本项目利用倾斜摄影测量手段,通过无人机倾斜摄影、三维建模、数字影像一体化测图手段,输出章丘区农村不动产区域实景三维模型、正射影像图及矢量线划图,作为农村不动产测绘初步底图。
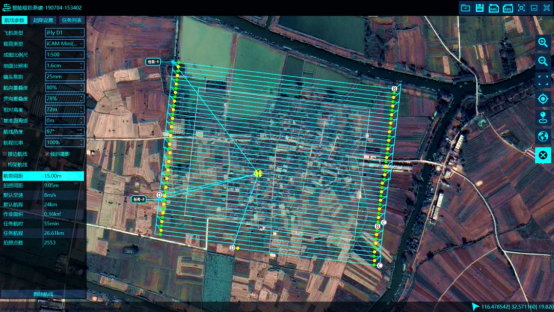
3.1航飞参数设计
利用航线设计软件,根据航飞参数对航线进行设计。航线应按摄区走向直线方法敷设,平行于摄区边界线的首末航线必须确保侧视镜头能获得测区有效影像。
使用DJ-GSPRO智能航测助手根据航飞参数对航线进行设计。以某村庄为例,测区面积0.32km²,房屋密集,设计地面分辨率为1.2cm,航高为100m,航向重叠度为80%,旁向重叠度为80%,飞行时间约为55min。
3.2像控点布设
布点前应提前做好航线计划图,在谷歌地图中导入并预设布点位置,保证布点均匀。外围像控点连线可以最大范围包裹目标村庄,内部按照100m左右均匀选取像控点。
 像控点分布
像控点分布
3.3作业过程中的注意事项
执行飞行任务时应着重避开高层建筑及信号塔,并应选择视野开阔、周围遮挡小、无明显信号干扰、远离人群和建筑物的地方作为无人机起降场地。
根据飞行计划控制飞行高度、航向重叠及旁向重叠。航摄时间尽量控制在早上9:00至下午16:00之间。测区地势平坦,同一任务所有航线可以保持在同一高度上。
每架次作业前都要做好各项检查记录工作。对飞机、倾斜相机等主要设备和电源系统、记录系统进行定期检查,使其保持良好工作状态。注意机体上各部位螺母的检查和飞控系统的测试,确保飞行安全。
作业过程中,施测人员须通过地面站软件实时监控无人机的各项飞行参数,包括姿态、高度、电量、空速、风速、卫星数、信号强度等。当现场环境或者无人机状态发生突变时,应尽快控制飞机返航,确保人员和仪器的安全。
3.4实景三维模型制作和正射影像生产
完成数据导入和像控点输入后,将进入自动化空三加密过程。在ContextCapture Center自动建模系统中加载摄区影像,人工给定一定数量的控制点,软件采用光束法区域网整体平差,以一张像片组成的一束光线作为一个平差单元,以中心投影的共线方程作为平差单元的基础方程,通过各光线束在空间的旋转和平移,使模型之间的公共光线实现最佳交会,将整体区域最佳地加入到控制点坐标系中,从而恢复地物间的空间位置关系。
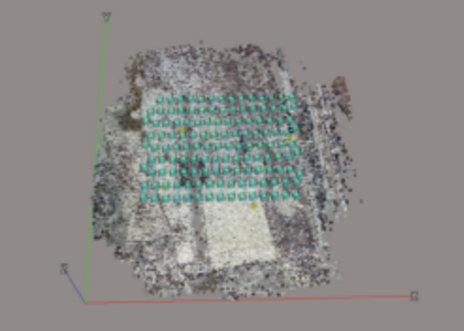 空三加密示意图
空三加密示意图
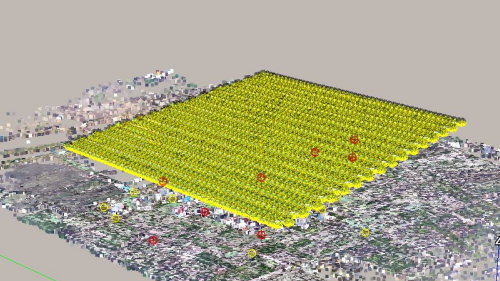
系统根据高精度的影像匹配算法,自动匹配出所有影像中的同名点,并从影像中抽取更多的特征点构成密集点云,从而更精确地表达地物的细节。地物越复杂,建筑物越密集的地方,点密集程度越高;反之,则相对稀疏。
 向阳面
向阳面
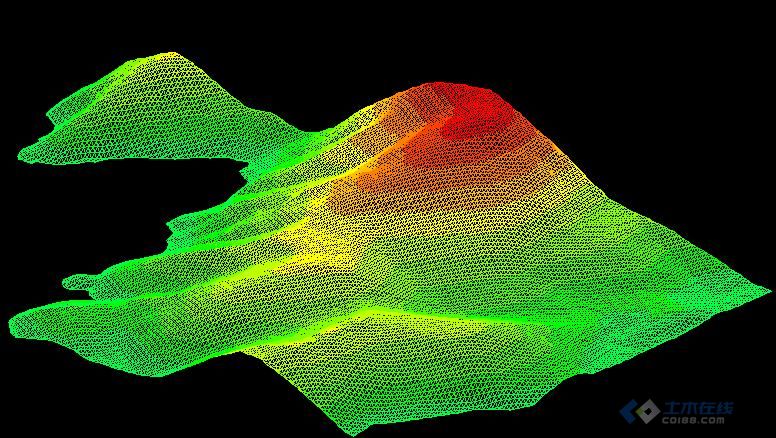
利用影像密集匹配的结果,由空三建立的影像之间的三角关系构成三角TIN,再由三角TIN构成白模,软件从影像中计算对应的纹理,并自动将纹理映射到对应的白模上,最终形成真实三维场景,

3.5三维测图
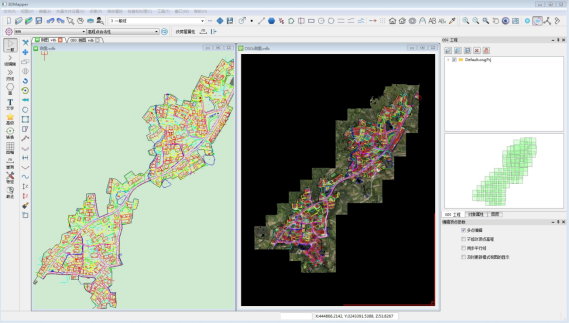
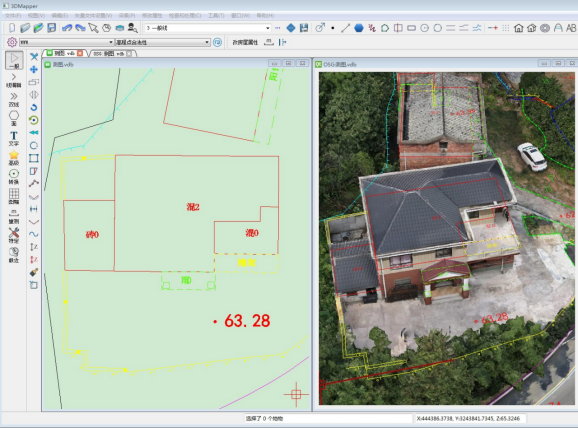
利用前期生产得到的倾斜三维模型(OSGB格式)导入到数据采集软件(TSD 3DMapper)中,利用三维测图模块,对各要素进行矢量化。
按模型进行所需要素采集,做到不变形、不移位、无错漏。采集依比例及用符号表示的地物时,应以测标中心切准轮廓线或拐点连接,采集不依比例尺表示地物时,就以测标中心切准基点、结点、定位线。
数据采集后,可从TSD 3DMapper中,导出DWG文件。目前TSD 3DMapper配置了与CASS符号库对应的对照表,导出符号化的DWG文件时,可直接对应CASS的要素层、代码、线型、线宽等,在TSD 3DMapper中无需再编辑。
3.6质量控制和保障
摄影时机
在规定的航摄期限内,选择地表植被及其它覆盖物对成图影响较小、云雾少、无扬尘(沙)大气透明度好的时间段进行摄影。航摄时,即要保证具有充足的光照度,又要避免过大的阴影。
根据地形、地物条件的不同,严格按规范规定的太阳高度角要求选择摄影时间,单个测区影像采集前后时间间隔最大不超过10天。
像控点成果
对像控点布点方案、像控点照片点位图、原始观测成果进行逐一检查,确保像控点布设和采集符合本设计要求。
飞行质量的保证
飞行要求影像覆盖摄区完整,满足航摄规定要求,发现相对漏洞和绝对漏洞应记录在报告书内,方便进行补摄或重摄。
1)采用无人机配备的飞行管理系统,按设计航迹导航,选派技术好,经验丰富的飞手,保持好飞行姿态,确保各项技术指标符合要求。
2)每次飞行结束后,要对旁向重叠、范围保证等元素进行逐一检查,做出详细的质检记录,凡不符合要求的产品,必须及时进行补摄或重摄。
3)在进行完数据下载之后,利用Inertial Explorer、Trip软件对机载GPS,地面基准站观测数据进行GPS动态差分处理和GPS、IMU数据融合。对航迹进行分析,通过相应的质量控制标准进行控制。
4)在影像数据预处理生产之后,使用质量检查软件对影像进行检查,检查是否有云影,影像清晰度,航线弯曲度,旁向重叠以及摄区范围的保证。如果有其中一项不符合要求,立即采取补飞。
影像质量的保证
每天飞行后,飞手和质检人员应对获取影像质量进行检查,并填写飞行后质量检查报告书。要求影像清晰,反差适中。有较丰富的层次、能辨别与地面分辨率相适应的细小地物影像,满足外业全要素精确调绘和室内判读的要求。
补摄与重摄
1)航摄过程中出现的绝对漏洞(旁向重叠率达不到空三解算质量的要求)、相对漏洞(旁向相片之间出现漏摄)及其它严重缺陷必须及时补摄。
2)漏洞补摄必须按原设计航迹进行。补摄航线的长度应满足用户区域网加密布点的要求。补摄航线的两端应超出漏洞之外不少于3条航线,并应采用同一主距和型号的数字航摄仪进行补摄。
3)对于不影响内业加密选点和模型连接的相对漏洞及局部缺陷(如云、云影、斑痕等)需补摄,补摄需整条航线重摄。补摄航线的长度应超出漏洞外2条航线,并应采用同一主距和型号的相机进行补摄。
三维模型质量检查
实景三维模型成果的质量检查应以数据的规范性、完整性、正确性为检查原则,过程检查对数据的空间参考系、位置精度、逻辑一致性、模型质量、附件质量等方面进行100%的全面检查。
DLG成果质量检查
对DLG成果数据的规范性、完整性、正确性进行检查,通过外业实测点进行采集精度误差统计,确保成果数据的精度符合设计要求。